EtherCAT總線是一種現代化的高性能工業通信總線,可以像傳統的實時控制總線一樣,連接以太網設備和實時EtherCAT設備,實現分布式控制。 EtherCAT總線伺服控制主要涉及到幾個關鍵步驟。首先,你需要將通訊線插...
2024-02-18
伺服驅動器作為工業機器人中的核心組件,對其運動性能和控制精度起著至關重要的作用。以下是它在工業機器人中的具體應用和重要性:1.精確控制,2.高速響應,3.適應復雜任務,4.協同作業,5.適應性強,6.集成化與智能化,7.節能與環保
2024-01-30
伺服驅動器的安裝與維護是確保其穩定運行和延長壽命的關鍵環節。安裝注意事項:1.穩定的基礎,2.散熱空間,3.電纜連接,4.防護等級;維護保養建議:1.定期檢查,2.清潔與除塵,3.軟件更新,4.備份與數據記錄,5.預防性維護,6.專業人員的操作,7.安全注意事項
2024-01-24
隨著科技的不斷發展,伺服驅動器也在不斷進化,以滿足工業自動化領域日益增長的需求。讓我們一起看看它未來的發展趨勢
2024-01-20
在選擇伺服驅動器時,我們需要考慮多方面的因素,以確保所選的驅動器能夠滿足應用需求并具備良好的性能。以下是幾個關鍵的選型要點:1.明確應用需求;2.選擇合適的規格;3.比較不同產品;4.實際測試和評估;5.考慮品牌和服務;6.集成與擴展性;7.成本與投資回報
2024-01-09
伺服驅動器,作為工業自動化領域的關鍵設備,其技術特點決定了它在各種應用中的性能表現。了解這些技術特點,可以幫助我們更好地選擇和應用伺服驅動器。
2024-01-02
伺服驅動器是工業自動化領域中非常重要的設備之一,它能夠實現精確的速度和位置控制,提高設備的生產效率和產品質量。然而,市面上種類繁多,如何挑選適合自己應用的呢?本文將為您提供一些挑選伺服驅動器的關鍵因素和步驟。
2023-12-26
伺服驅動器作為一種高性能的電機控制設備,在工業自動化領域發揮著重要的作用。本文將圍繞其在工業自動化領域的作用展開討論。
2023-12-21
隨著工業自動化的快速發展,伺服驅動器在工業自動化領域發揮著越來越重要的作用。本文將圍繞其在工業自動化領域的應用展開討論。
2023-12-21
隨著工業4.0和智能制造的興起,伺服驅動器作為自動化控制領域的關鍵設備,正經歷著前所未有的技術變革。現在不僅在性能上有所提升,還在智能化、網絡化等方面取得了顯著進步。
2023-12-21
隨著工業自動化的快速發展,伺服驅動器在各種應用中發揮著越來越重要的作用。伺服驅動器是一種能夠精確控制電機運動和速度的設備,廣泛應用于機器人、數控機床、包裝設備、輸送系統等自動化設備。
2023-12-15
在-40度環境下,低溫伺服驅動器的工作原理與一般伺服驅動器類似,但需要特別考慮低溫環境對驅動器性能和可靠性的影響。以下是在-40度環境下低溫伺服驅動器的工作原理:
2023-12-12
PLC,即可編程邏輯控制器,是工業設備應用最廣泛、最受用戶歡迎的電子設備,數據顯示,工業企業90%以上的機械設備是由PLC進行控制。伺服系統作為一種自動化運動控制裝置,主要用于精確地實現對機械部件的位置、方位...
2023-12-06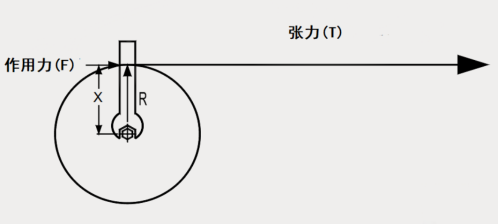
張力是指受到拉力作用時,物體內部任一截面兩側存在的相互牽引力。長材料的加工過程中,比如:紙、膠片、線、電纜、各種薄膜和繩等都存在張力。張力控制是對在兩個加工設備之間作連續運動或靜止的被加工材料所受的張力進行自動控制的技術。
2023-09-25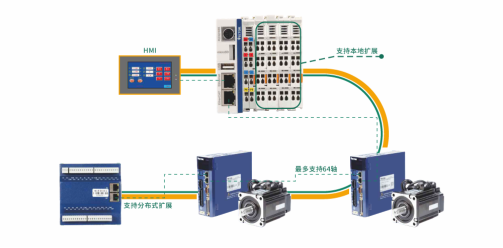
總線控制是一種基于總線通信技術的控制系統,通過總線可以對十幾軸甚至數百軸進行實時控制和數據交換,分布式IO解決了長線傳輸問題,從而通過一根網線完成高效實時控制。而且,在控制速度和精度上優勢明顯。
2023-09-25
在現代工業領域,隨著自動化和智能化的不斷發展,可編程伺服驅動器成為了關鍵技術之一。可編程伺服驅動器以其綜合功能、內置運動控制器、多樣化命令控制、強大的調試軟件和函數庫,以及完善的保護機制等特點,為工業控制系統帶來了諸多優勢。本文將深入探討可編程伺服驅動器的特點和優勢,并說明其在工業應用中的重要性。
2023-09-24
伺服驅動器?作為現代工業自動化領域中不可或缺的重要組成部分,負責將控制信號轉化為機械運動,廣泛應用于機床、印刷設備、機器人等各個領域。在中國市場,涌現出了眾多優秀的伺服驅動器品牌,它們以技術創新和產品質量在市場中樹立了良好的聲譽。
2023-09-24
在現代工業自動化領域,伺服驅動器?作為一種重要的運動控制裝置,為各種機械設備和系統提供了精確、高效的運動控制能力。隨著技術的不斷發展,伺服驅動器市場上涌現了眾多品牌和產品,它們在性能、可靠性、應用范圍等方面各有特點。威科達將針對伺服驅動器領域,從多個維度對十大排名進行介紹,以期幫助讀者更好地了解當前市場上的狀況。
2023-09-24
在現代工業領域,伺服驅動器?是一種重要的電氣控制設備,它在各種自動化系統中發揮著關鍵作用。伺服驅動器的作用類似于人類的神經系統,它能夠精確地控制機械設備的運動,實現高精度、高效率的運動控制。
2023-09-24
伺服驅動器是工業自動化領域中常見的關鍵設備,它能夠精確控制電機的運動,實現高精度和高效率的運作。正確的接線是確保伺服驅動器正常工作的重要一步,本文將介紹伺服驅動器接線的基本步驟和注意事項,幫助讀者更好地理解如何正確接線以確保設備的安全穩定運行。
2023-09-24 微信公眾號
微信公眾號
 抖音
抖音